-
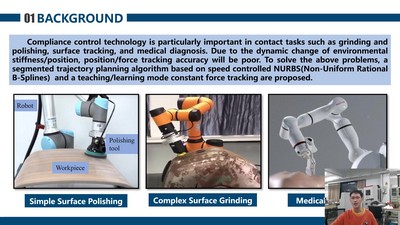
A Constant Force Tracking Strategy for Complex Surface Robots Fused with NURBS Speed Planning and Teaching/Learning Mode
Duan, Jinjun/Cui, Kunkun/Guo, An/Wang, Lingyu/Bin, YiMing/Wan, Minhong/Huang, Qiulan
-
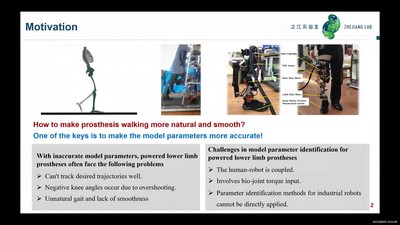
Modeling and Parameter Identification for Human-robot Coupled Systems in Powered Lower Limb Prostheses
Huang, Yongshan/Wang, Xin/Liang, Dingkun/Xiong, Jiaming/Xie, Anhuan/Gu, Jason
-
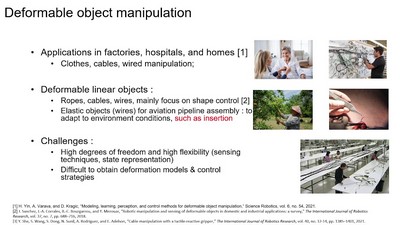
Fusing Vision and Force : A Framework of Reinforcement Learning for Elastic Peg-in-Hole Assembly
Dang, Renjun/Hou, Zhimin/Yang, Wenhao/Chen, Rui/Xu, Jing